
A címkép az [1], [5] és [6] képek felhasználásával készült
Bevezetés
Már írtam egy Útravaló posztban a GPS segítségével történő tájékozódásról, amelyet aztán egy másik posztban ápdételtem, de azokban csupán a GPS-nek a természetben történő helymeghatározásban betöltött szerepéről beszéltem. Ebben a posztban viszont megpróbálom közérthetően bemutatni a műholdas helymeghatározás elvét, valamint azt, hogyan tudjuk ezt felhasználni a mindennapi életünkben. Habár ennek a fajta tájékozódásnak komoly műszaki és matematikai háttere van, ígérem, most is megpróbálok a közérthetőség talaján maradni, hogy mindenfajta tudományos képzettség nélkül is világos legyen az, amiről szólni szeretnék!
Összesen hány ilyen rendszer is van?
Már mindenki hallott a GPS-ről, amely az angol Global Positioning System rövidítése – magyarra talán globális helymeghatározó rendszerként ferdíthető – és eredetileg az Amerikai Egyesült Államok védelmi minisztériuma által kifejlesztett rendszert jelentette. 1993-ra épült ki teljesen, vagyis akkorra állították pályára mind a 24 darab Navstar műholdat. Igen ám, de az amerikaiak a rendszer működésének első éveiben zavarójelet is sugároztak, és ha a felhasználó nem ismerte a feloldó kódot, akkor csak nagyon pontatlanul, több száz méter hibával használhatta a rendszert. Jellegzetes katonai mentalitás – mondhatnánk –, de nyilván védeni próbálták a rendszerüket attól, hogy az ellenségeik is használhassák, ráadásul olyanok, akik még csak nem is fizettek érte! És ez még akár igaz is lehet, hiszen a rendszer kiépítése akkori árakon 12 milliárd dollár volt.
Habár ezt a zavarást kikapcsolták 2000 májusában (amit persze bármikor vissza is kapcsolhatnak), de azért ekkorra már az oroszok és a kínaiak is kifejlesztették a saját rendszereiket (GLONASS és BeiDou néven), sőt, az Európai Unió is létrehozta a saját Galileo névre hallgató rendszerét. Ezek működési elve szinte teljesen azonos, jelenleg a modernebb vevőkészülékek több rendszer műholdjainak jeleit is képesek fogni.
A saját Samsung A52S telefonom például mind a négy nagy műholdas rendszert képes használni, ezáltal eléggé pontos helyadatokkal képes szolgálni, hiszen mint majd látjuk, minél több műholdról kap jelet a saját GPS vevőnk, annál pontosabban képes a helyzetünket meghatározni. A nagymértékű hasonlóság miatt a legismertebb, amerikai rendszert vesszük ezután górcső alá. Tehát lássuk, hogyan működik a GPS!
A helymeghatározás elmélete
Ezt sajnos nem lehet megkerülni, ha ezt nem értjük, akkor ott ette meg a fene az egészet! Tehát lássuk a medvét! A térgeometria szabályai szerint ha egyetlen P jelű ponttól ismerem a távolságomat, akkor a pont körüli térben egy gömbfelületen bárhol lehetek. A gömb sugara az a távolság, amelyre a középpontjától vagyok. Ha két ponttól (P1 és P2) is ismerem a távolságomat, akkor mindkét pont köré megrajzolva a gömböt azok felületeinek metszéssíkjában egy körön helyezkedek el valahol.
Ha három ponttól (P1, P2, P3) is ismerem a távolságomat, akkor a három gömb metszési síkjai már két pontra redukálják a lehetséges helyzeteim számát (M1 és M2). Egy negyedik ponttal és köré rajzolt gömbbel tudnánk egyértelműsíteni a pozíciónkat, ez akár a Földünk is lehetne, hiszen ismerjük pontosan a sugarát, ráadásul általában a felületén tartózkodunk, vagy a méretéhez képest elhanyagolható távolságra a felszíntől. Ekkor már csak egyetlen pont lenne a korábbi három gömb földfelszíni közös metszéspontján, vagy a közelében, a másik valahová a világűrbe, vagy a Föld belsejébe esne, ami persze értelmetlen lenne – kivéve az űrhajósok és a bányászbéka számára, de az ő véleményükre most senki sem kíváncsi! Ekkor azonban nem tudnánk meghatározni a föld felszínétől (tengerszinttől) való távolságunkat, tehát fogadjuk el, hogy kell még egy negyedik pont is, melytől ismerjük a pontos távolságunkat.
Persze nem baj, ha négynél több ponttól is ismerjük a távolságunkat! A pontok helyzetét és távolságát úgyis csak bizonyos hibával ismerhetjük (abszolút pontos mérés ugyanis nem létezik), tehát biztosak lehetünk abban, hogy a gömbök metszési síkjai nem egyetlen pontot jelölnek ki, hanem egy talán csak egy-két tucat méter nagyságú tartományt. De ha sok ponttól is ismerjük a távolságunkat, a metszéseket kiszámítva találunk majd egy olyan helyet, ahol statisztikailag a legnagyobb valószínűséggel tartózkodhatunk, vagyis e pont közelébe esik a legtöbb metszés. Ez persze elméletnek nagyon szép, de mire megyünk vele a gyakorlatban?
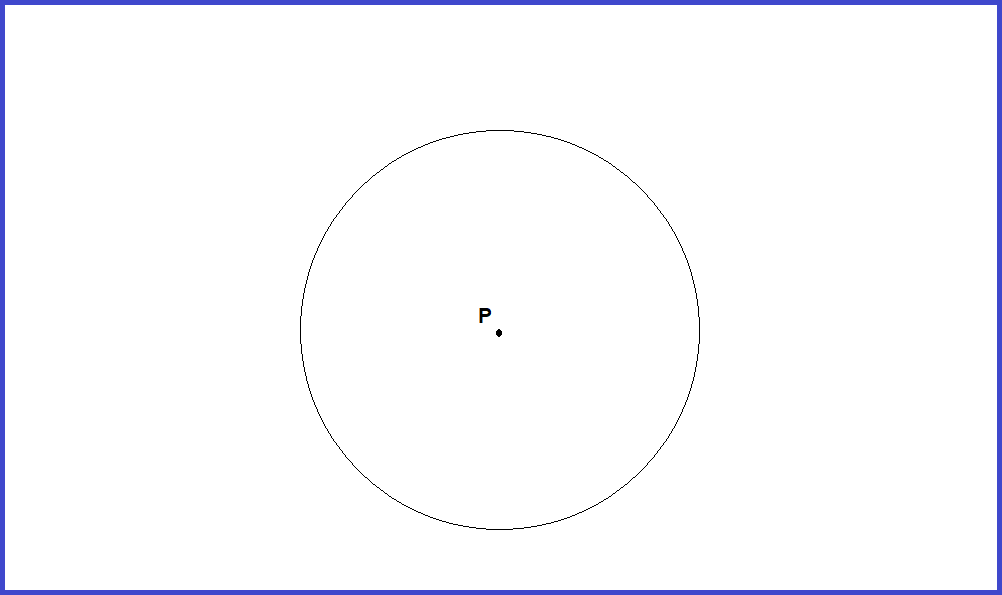
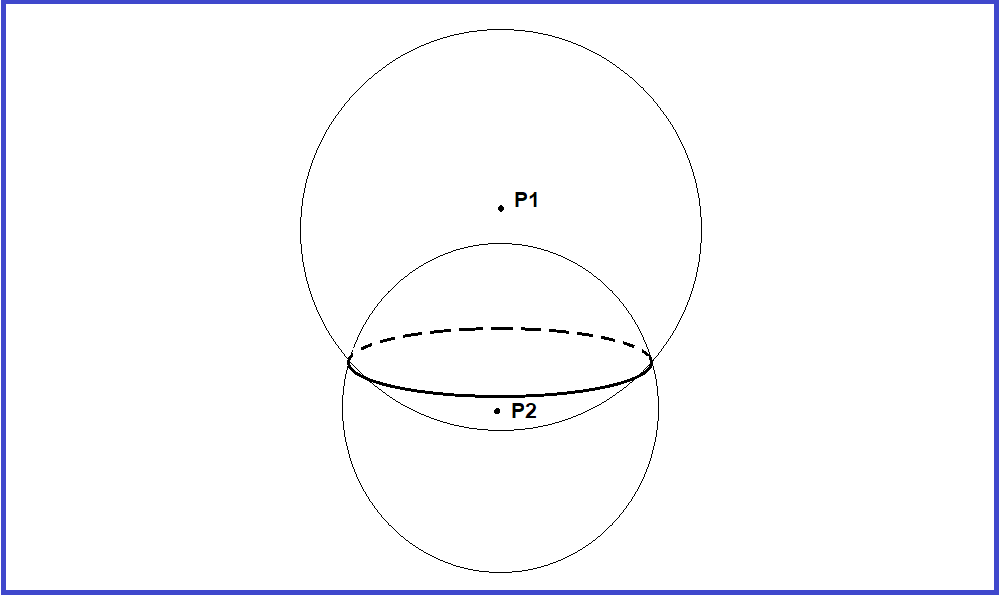
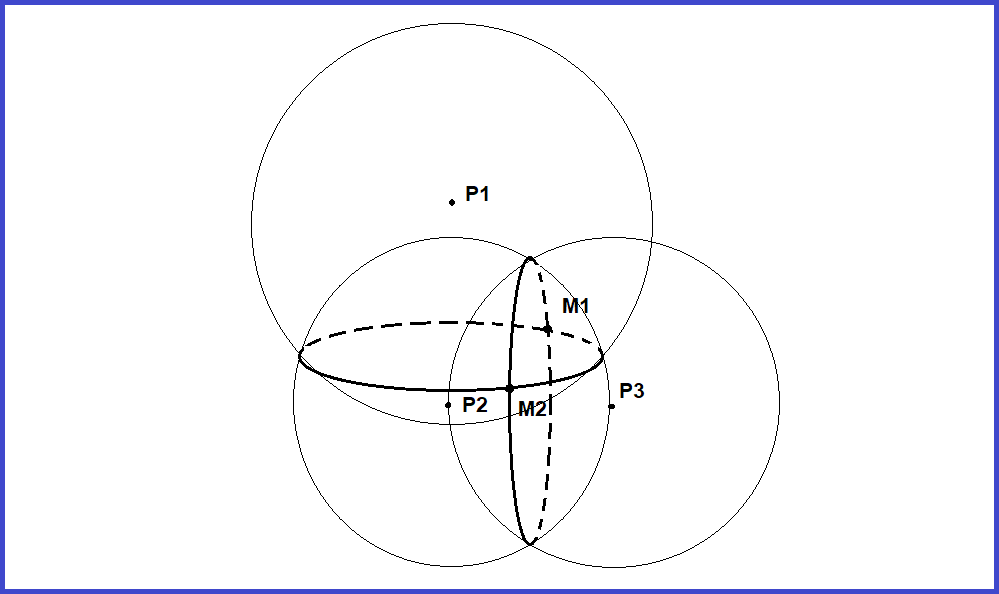
Egy kis térgeometria. Bővebb magyarázat a képek szövegében.
Mi a GPS működési elve?
Találtam egy nagyon jó animációt a Wikipédián arról, hogyan keringenek a Navstar GPS műholdak a Föld körül. Összesen 24 darab áll rendszerben belőlük, ezek különféle pályákon keringenek Földünk körül, de mind nagyjából 20200 km távolságra száguldozik a felszíntől - és ez a száguldozás szó szerint értendő, ugyanis naponta kétszer is megkerülik a bolygónkat. Persze ezek már nem azonosak azokkal a műholdakkal, melyeket még 1993-ig állítottak pályára, azóta már a harmadik generációjuk kering a Föld körül, persze néhány régebbi mesterséges holdat meghagyva tartaléknak.
Szinte hipnotizáló, ahogy a kis pöttyökként jelzett műholdak keringenek a Föld körül! [2] Ha a kék félgömbben állunk, akkor a fekete pöttyökkel rajzolt műholdak látótérben vannak, a pirosak pedig nem. A rövid szöveg jelzi is, hogy éppen hány műholdra van rálátásunk.
Pályájuk olyan, hogy ha a Földünk felszínén, sík terepen bárhol is állunk, legalább négy műholdra legyen mindig rálátásunk, ráadásul a pillanatnyi pozíciójukat nagyon pontosan (gyakorlatilag centiméteres pontossággal) ismerjük minden pillanatban! Hogyan lehet ezt elérni? Nagyon egyszerűen! A Föld felszínéről radarral követik a pályájukat, és a keringési adataikat ezen mérések alapján állandóan frissítik, és ezt közlik a műholdakkal is, melyek ezt kisugározzák. Tehát már meg is vannak azok a pontok, amelyekhez képest meg tudjuk majd állapítani a pozíciónkat!
Na jó – mondhatjuk –, a pontok már megvannak, hogy de hogy a pékbe ismerhetjük meg a távolságukat? Mert ugye azt is jó lenne tudni minimum méteres pontossággal! Nos, mérőszalagra nincs szükségünk ennek a megállapításához, csak nagyon-nagyon pontos órákra – és persze rengeteg számolásra! Tehát minden GPS műholdba beépítettek egy atomórát is, melyek nagyon pontosan járnak, de ezek járását is állandóan figyelik a Földről, és ha késnének, vagy sietnének, akkor korrigálják a járásukat.
A lényeg, hogy minden műhold pontos időzítéssel kétféle kódot sugároz ki magából: az egyik a precíziós kód, ezt csak katonáék tudják használni, de van mellette egy pontatlanabb is, na ezt tudjuk mi, egyszerű felhasználók fogni a készülékeinkkel. Ezeket a jeleket a műholdak az atomóráik által diktált ütemben sugározzák, tehát minden mesterséges hold mindig ugyanabban a pillanatban! Lássuk, mi van az általunk fogható jelekben? Egyrészt a műhold saját órájának a ideje – gyakorlatilag a pontos idő –, továbbá a keringési pályájára vonatkozó, a földfelszínről állandóan korrigált adatok. Tehát ezekből kell a mi vevőkészülékeinknek gazdálkodniuk!
Ez mind szép, fogjuk a jeleket a műholdakról, de hogyan számoljuk ki ebből a távolságukat? Ehhez már csak egyetlen dologgal kell tisztában lennünk, ez pedig a fény (és a rádióhullámok) terjedési sebessége! Ezt a sebességet szinte mindenki ismeri, és már rá is vágjuk a választ, hogy az 300.000 km/másodperc! Tényleg nagyjából ennyi, de a GPS-es helymeghatározás nem tűr semmilyen pongyolaságot, tehát egészen pontosan 299 792 458 méter másodpercenként vákuumban mérve.
Az már eddig is tiszta sor volt, hogy a műholdak pontos helyének ismerete létfontosságú, hiszen ez egyértelműen meghatározza saját pozíciónk megállapításának pontosságát is, de így már világos az is, hogy miért nélkülözhetetlen a méréshez a pontos idő ismerete is! Ha a 300.000 km/másodperc körülbelüli sebességgel számolunk, akkor is egymilliomod másodperc (1 mikroszekundum) alatt 300 métert tesznek meg a rádióhullámok, egy milliárdod másodperc (1 nanoszekundum) alatt pedig durván 30 centimétert. Hát nagyjából ilyen pontosan kell mérnünk az időt a GPS rendszer megfelelő pontosságának eléréséhez! Ide tényleg szükségesek az atomórák!
A rádióhullámok terjedési sebességéből adódóan minden műhold jele bizonyos késéssel érkezik meg a mi GPS vevőnkhöz, hiszen a jeleknek időre van szükségük ahhoz, hogy elérjenek hozzánk. Nagyon fontos, hogy minden GPS műhold szinkronizáltan sugározza a jeleket, tehát ha különböző időpontokban fogjuk azokat, az csakis egyetlen ok miatt lehet: az egyik közelebb van hozzánk, a másik pedig távolabb! Mivel ismerjük a pozíciójukat, a jelek késéséből már kiszámítható matematikai egyenletek megoldásával a távolságuk! Most már nincs szükségünk másra, mint hogy a vevőnk ezekből az adatokból elvégezze a szükséges számításokat, és hogy ezt közölje is velünk!
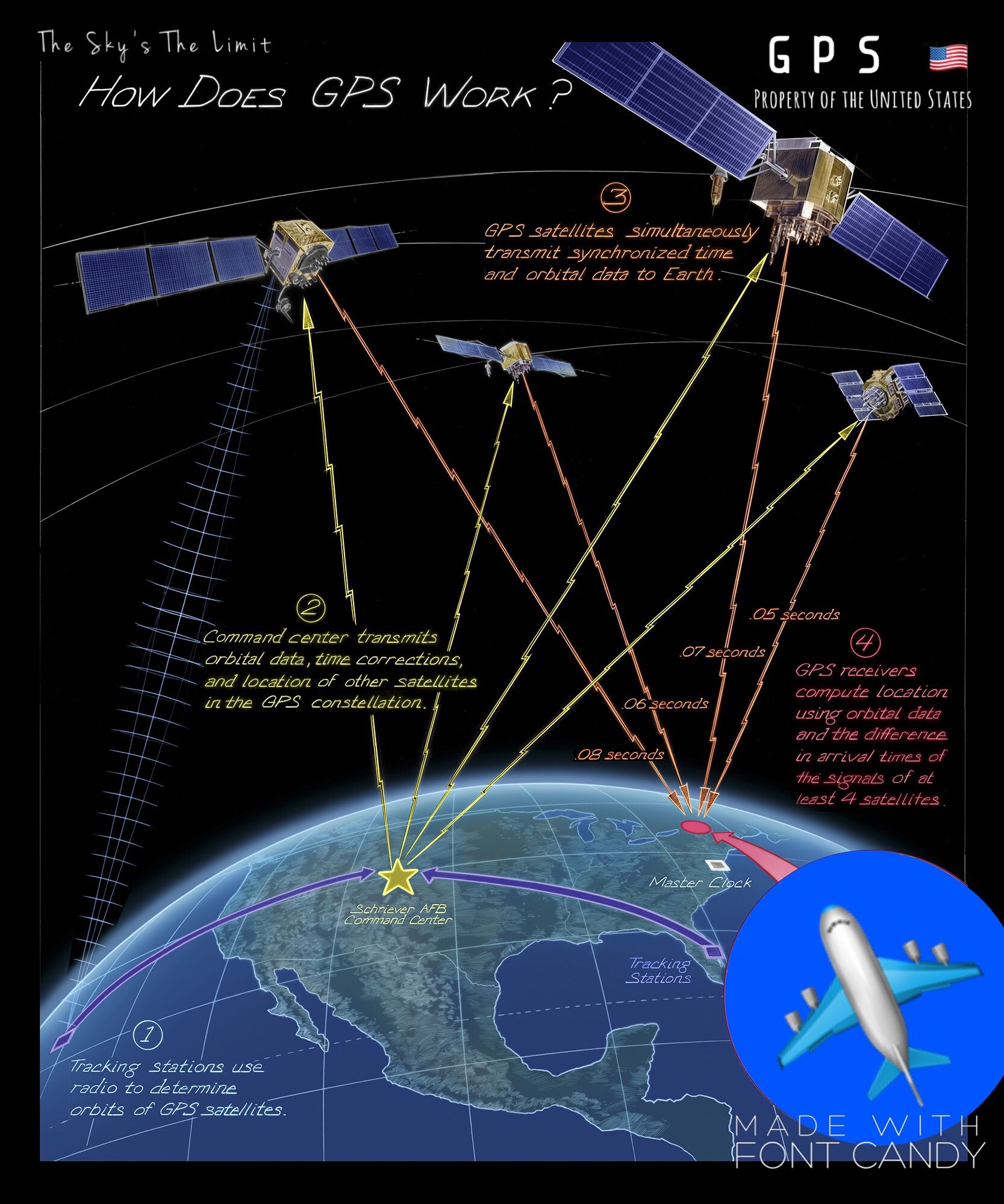
Na tessék, én csak csépelem a billentyűzetet, és csak most találtam meg ezt a príma magyarázó képet a neten!! [7] A szöveg általam magyarított fordítása:
1. A követő állomások rádió használatával határozzák meg a GPS műholdak föld körüli pályáját.
2. A vezérlőközpont pályaadatokat, időkorrekciót és a GPS rendszer többi mesterséges holdjának helyzetét közvetíti a műholdaknak.
3. A műholdak egyidejűleg sugározzák a szinkronizált idő- és pályaadatokat a Földre.
4. A GPS vevők kiszámítják a helyzetüket legalább négy műhold pályaadataiból és a róluk érkező jelek késési idejéből.
Szóval ennyi az egész! Nem egy bonyolult dolog, igaz? Nem is értem, miért nem találták már ki a neandervölgyi őseink! :-)
Na, és mit kezdünk a puszta földrajzi helyzetünk ismeretével?
De tényleg, mit tudunk kezdeni azzal, hogy a GPS vevőnk közli velünk, hogy éppen az északi szélesség 47,507040-dik és a keleti hosszúság 19,046768-dik fokán állunk? Az égvilágon semmit, ugyanis térkép nélkül meg nem tudnánk mondani, hogy hol is vagyunk a valóságban!
A GPS hőskorában talán még papírtérképre vezették fel ezt a pozíciót és tudták meg így a földrajzi helyzetet, de a számítástechnika folytonos, ráadásul rohamos fejlődése már ezt is feleslegessé tette! Manapság már olyan virtuális térképek tucatjai léteznek, melyek azonnal megmutatják, hogy hol is vannak a fentebb megadott koordináták (egyébként a Parlament főlépcsőjének közepén). Ilyen a mindennapi életben a Google Térkép is, de ennek van egy nagy hátránya, mégpedig az, hogy a használatához internetre van szükségünk, hiszen onnan tölti le a vevőkészülékünk a térképrészleteket.
Léteznek azonban úgynevezett offline térképek is, ezek a vevőkészülékünk memóriájába vannak elmentve, és ezekre vetíti aztán rá a GPS vevőnk a pozíciónkat. Igazából csakis így lehet a GPS-es tájékozódás igazi offroad tevékenység, tehát hogy a helyzetünk térképen történő megjelenítése a sivatagokban és őserdőkben, vagy akár az Antarktisz jégsivatagában is működhessen a civilizált világgal való bármifajta kapcsolat nélkül! Ilyenek az autós navigációt segítő offline térképek, de a turista GPS-ek térképei is és természetesen a mobiltelefonunkra is feltölthetünk ilyeneket. A lényegük az, hogy mivel a GPS vevőnk működéséhez nem kell az internet, ne kelljen a helyzetünk térképen történő megjelenítéséhez sem!
Mik a GPS rendszer korlátai?
A mi egyszerű GPS vevőinkben nagyjából másfél méteres hibát okozhat a műholdak atomórájának pontatlansága, két és fél méteres hibát a műholdak pozícióhibája. Hatással van rá Földünk ionoszférája (ez akár öt méteres hibát is okozhat), de a légkör is befolyásolhatja a rádióhullámok terjedését. Ezek a hibák összességükben akár 6-8 méteres eltérést is eredményezhetnek, de katonáék legalább egy nagyságrenddel pontosabban tudják meghatározni a helyzetüket, tehát egy méteren belül tudják, hogy éppen hol vannak (pontosabban, hogy hol van a GPS vevőjük)! Kis túlzással mondhatnám, hogy nem csak egy bujkáló terrorista bunkerját találhatják el a GPS vezérelte cirkálórakétával, de akár a bibircsókos orra hegyét is.
A GPS műholdak 1575,42 MHz frekvencián sugározzák azt a jelet, melyet mi egyszerű felhasználók foghatunk, és ez alapvetően meghatározza a vételi lehetőségeket! Ezek a nagyfrekvenciás (VHF) jelek már szinte fényként terjednek, hegyek, nagyobb épületek leárnyékolják azokat, épületek belsejében is alaposan lecsökken a vételi lehetőség. Gyakorlatilag egy vastagabb fal, pláne, ha vasbeton, szinte nullára csökkenti a jelek vételét. Mivel a fényhez és a radarhullámokhoz hasonlóan visszaverődik az épületekről, nagyobb tereptárgyakról, így az hibát okozhat a GPS vevőnk működésében is, mivel nem a direktben érkező jelet fogja a vevőnk, hanem a hosszabb utat bejárt, visszaverődött jelet. A fentiekből adódik, hogy pincékben, barlangokban sem használható ez a fajta helymeghatározó rendszer!
És egy másik szép kép a Navstar műholdak keringéséről [3]
A GPS vevőnk nyílt, sík területen pontosabban állapítja meg a pozíciónkat, mint szűk völgyekben, szurdokokban, szakadékokban. Ugyanez a helyzet a városokban is, az emeletes házak közötti szűk utcákban. Ennek is nyilvánvaló az oka, hiszen csak szűk, korlátozott az égre való kitekintésünk ezeken a helyeken, tehát kevesebb műholdat látunk a fejünk felett. Ezért jó az, ha a vevőnk több rendszer műholdjait is érzékeli, így a több rendelkezésre álló adatból pontosabban tudja megállapítani a helyzetünket.
És még egy dolog. Az amerikai, az orosz és a kínai rendszer is elsősorban katonai fejlesztés, most csupán megengedik, hogy polgári célra is felhasználjuk azokat. Egy komoly háborús helyzetben bármelyik rendszert kódolhatják, és akkor számunkra hozzáférhetetlenné válnak! Ez alól csak a Galileo rendszer a kivétel, ezt ugyanis polgári felhasználásra fejlesztette ki az Európai Unió és működteti az Európai Űrügynökséggel.
GPS a mobiltelefonokban
Eddig szándékosan csak GPS vevőkről beszéltem, de mik is lehetnek ezek? Nyilván mindenki számára ismerős az autós navigációs rendszer szélvédőre rögzített kijelzője (ami természetesen tartalmazza a vevőt is), de sokan használunk a természetjárók közül turista GPS-t. Ezek a készülékek a hátizsák vállszíjára csíptethetőek, tehát mindig szem előtt vannak. Vannak GPS vevők a fejlettebb autólopást gátló rendszerekben, ezek ráadásul a pozíciójukat folyamatosan sugározzák, hogy az ellopott autók könnyen megtalálhatóak legyenek. Fuvarozó és taxis cégek is kiépíthetnek nyomkövető rendszereket, de már a budapesti tömegközlekedési járműveken is megtalálható ez, ez alapján működnek a FUTÁR (Fővárosi Utastájékoztató Rendszer) kijelzői is, amikor közlik velünk, hány perc múlva érkezik majd mondjuk a következő 4-es tuja a megállóba.
Azonban talán a legkönnyebben az okostelefonjaink tudták magukba integrálni a GPS-t a navigációt segítve, ezáltal még sokoldalúbbá válva. Gyakorlatilag már ott tartunk, hogy a mobilunknak csak egy funkciója a sok közül a navigáció, hiszen tudunk vele fényképezni, filmet készíteni, zenét hallgatni és televíziót nézni, akár még könyvet is olvashatunk vele, vagy internetezhetünk. Ráadásul a beépített GPS vevő jeleit már egy rahedli applikáció használja az outdoor edzőprogramoktól kezdve a turista tájékozódáson keresztül egészen a navigációs appokig. Még ezelőtt húsz évvel is egy kazalnyi holmit kellett volna magunkkal hordani, hogy a fentebb felsorolt funkciókat használhassuk egy utazásunk során, mára már elegendő mindehhez a mobilunk. A fejlődés megállíthatatlan – legalábbis most még úgy tűnik.
Remélem, ezzel a poszttal egy kicsit sikerült közelebb hoznom sokak számára a GPS működési elvét és megértetni azt, hogy milyen bonyolult technika bújik meg mögötte a háttérben!
Ha tetszett a bejegyzés, kövesd a blogot a facebookon is!
Felhasznált irodalom:
[1] https://hu.wikipedia.org/wiki/Global_Positioning_System
[2] https://en.wikipedia.org/wiki/Global_Positioning_System
[3] https://hu.wikipedia.org/wiki/Galileo_(navig%C3%A1ci%C3%B3s_rendszer)
[4] https://www.multinavigator.hu/cikk.php?id=1288
Képek forrásai:
[1] https://en.wikipedia.org/wiki/Global_Positioning_System
[2] https://hu.wikipedia.org/wiki/Global_Positioning_System
[3] https://www.space.com/19794-navstar.html
[4] https://www.space.com/19794-navstar.html
[5] https://www.britannica.com/technology/GPS/Augmentation
[6] /https://www.emag.hu/navigacio-7-teljes-europa-ingyenes-terkepfrissites-<>a-teljes-elettartam-alatt-8gb-gps/pd/DGDP0SBBM
[7] https://www.facebook.com/iskysthelimit
A gömbök metszősíkjainak rajzait saját magam követtem el a Win10 Paint programjával.









